水下航行器的电动机选择:部分负载效率的考虑
很容易理解为什么永磁同步电机 (PMSM) 广泛用于水下航行器 (UV)。它们结构紧凑,效率高,功率密度高。也许更重要的是,它们允许在广泛的 RPM 范围内有效运行,这有利于具有多种运行条件的车辆。也就是说,我们发现汽车产品开发人员通常不确定电机的“效率”。本文从螺旋桨设计师的角度提供了一些评论,开发了将负载放在 UV 电机上的组件。
我们首先必须从对“系统”的描述开始,它由车辆(确定推力要求)、推进器(通常是产生所需推力的开放式或导管式螺旋桨)和驱动器(原动机)组成其唯一的工作是以必要的 RPM 旋转推进器)。如果我们将系统包装成一个概念单元,系统收益是车速(或推力,在牵引应用的情况下),而系统成本是“油耗”。对于由内燃机驱动的系统,成本是燃料油的消耗量,比方说,以升/小时为单位。发动机制造商通常会提供有关发动机 RPM 和功率范围内燃料消耗的足够信息,以便我们能够可靠地预测任何应用的燃料使用情况。这种分布图通常被称为“燃料图”,但让我让您将其视为输出到输入的能量“效率图”。
不幸的是,我们在使用 PMSM 驱动器时遇到了完全不同的情况。可能会出现混淆,因为电机产生的效益和电机使用的燃料共享术语“功率”——一个是输出机械轴功率(驱动推进器),另一个是它的输入电功率(电压的函数)和控制器提供的电流)。两者之比就是“电机效率”。了解所有 RPM 和负载下的正确电机效率对于成功的系统设计和分析至关重要。虽然大多数开发人员测试记录的是电功率,但我们需要了解轴功率才能了解系统的整体性能。
虽然制造商发布的电机曲线指示整个 RPM 范围内的扭矩(以及功率)限制,但它们通常仅指示单个设计点或扭矩限制的机械到电气效率。与发动机供应商提供的不同,我们很少有涵盖 PMSM 的 RPM 和轴功率负载有用范围的完整的机械功率“效率图”。为了获得这些数据,我们的一些客户在小型测功机上测试了他们的电机以生成效率图。然而,这可能既费钱又费时——而且在早期设计阶段可能会浪费时间,因为在早期设计阶段甚至会怀疑是否会选择电机。
PMSM 效率损失的根源是什么?解释是绕组电阻、机械摩擦甚至磁通量效应等术语的复杂组合。因此,让我们使用以下广义术语进行一些概括,稍微简化一下:机械负载轴功率 (PS)、效率 (EFF)、RPM 和功率损耗 (LOSS)。
• 电机效率定义为EFF = PS / (PS+LOSS)。
• 为简化起见,我们可以说损耗有两种类型:取决于功率负载或取决于 RPM。
• 损失(不是效率,而是损失)往往与a) 与RPM 和b) 与功率的平方成正比。
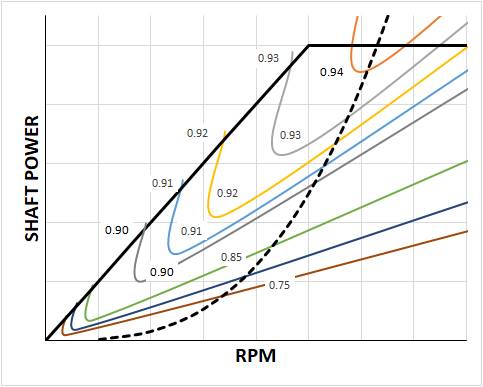
下图显示了“恒转矩、恒功率”PMSM 的通用代表性效率图。我们的做法是始终将“基于扭矩”的绘图转换为“基于功率”的绘图,因为我们认为功率是传达车辆和推进器的能量生成和传输的更好方式。黑色实线代表电机的极限曲线,虚线是通用推进器需求曲线,彩色线是效率图示例。
从该图中,我们可以看出在部分负载下运行如何影响电机效率。保持高效率的 RPM 范围很广,因为几乎一半的 RPM 上限都在电机最大效率的百分之几以内——只要电机产生其额定功率的 80% 左右。在车辆运行方面,最高时速效率最高,达到95%。在 75% 的速度下,功率需求为 40%-45%,效率降至 85%-90%。在 50% 的速度下,几乎不需要功率,电机效率可降至 75% 以下。
(请记住,这些是此处用于表示概念的通用数字。实际效率因型号而异。)
所以,让我给你留下一些基本的观察:
• PMSM 的最大潜在效率因电机尺寸而异——更大功率的电机提供更高效率的潜力。例如,20 kW PMSM 的最大电机效率在满载时可超过 95%,而小于 1 kW 的电机通常只能达到 90%。
• 如上所述,虽然效率随转速而变化,但对于大多数需要满载或接近满载的应用来说,应该有一个相当广泛的转速范围来保持高效率。
• 部分功率负载是大多数应用的大问题,因为以低功率运行电机会导致电机效率显着下降。例如,对于分数轴功率,电机效率可能会降至 70% 以下。
电动机——尤其是 PMSM——是我们 2020 年 NavCad 开发工作的一个重要重点。我们正在努力简化 NavCad 中这些驱动器的定义,将电力作为“燃料”和通用电动机曲线形状(例如“恒定-扭矩,恒功率”)用于早期设计。当然,我们还深入研究了非设计部分负载效率图的预测模型!
在 2020 年 3 月版的海洋技术记者中阅读这个故事: https://magazines.marinelink.com/nwm/MarineTechnology/202003/#page/20

开发的ATLANTIS着陆器上。图片来源:EdgeLab")

和30千瓦时(266伏直流)。图片来源:Ictineu Submarins SL")





-168169 "庆祝为客户 Jan De Nul 完成首辆商用 Quantum 电动汽车的现场验收测试(图片来源:SMD)")

期间,一艘美国海军全球自主侦察艇(GARC)在大西洋进行机动演练。“联合海上联合演习”是世界上持续时间最长的多国海上联合演习的第66届。(美国海军官方照片)")