海底技术的“小型化之路”

NotiloPlus的Seasam AUV已在世界各地运营。图片来自NotiloPlus。

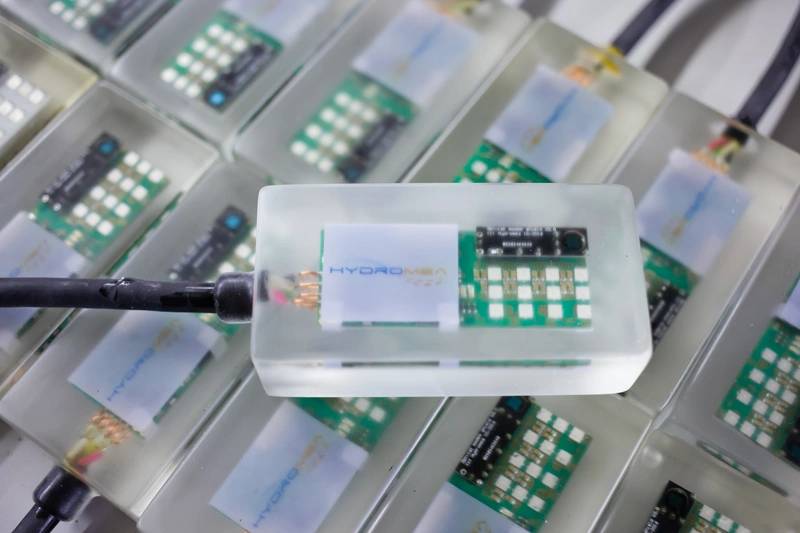
Hydromea的LUMA调制解调器用于从Ashtead的AMS +系统传输数据。图片来自Hydromea。

LUMA调制解调器已用于通过ROV将陀螺仪数据传输到地面,以辅助海底起重机操作。图片来自Hydromea。

Water Link的Oliver Skisland在Tau示范活动上的讲话。 Elaine Maslin摄。

Birdview已经在挪威的渔船上测试了无人机。鸟瞰图。

Birdview的浸入式声纳概念。图片来自Olav Bruset。
越来越多的小型紧凑型系统营正在向海底世界进军,以某种方式使其拥有更大的空间供更多人进入。 Elaine Maslin报告。
小型遥控车(ROV)和小型自主水下航行器(AUV)的数量正在增长,从而推动了支持它们的小型技术的发展。结果是有一些新孩子上路,您可以称之为小型化的崛起。
他们从汽车制造商到声学和光学传感器系统制造商。其中一些人参加了由挪威的Equinor于2019年10月在斯塔万格附近的Tau举行的针对海上空间无人系统的演示活动。
NotiloPlus
首先是汽车制造商,其一是法国的初创公司NotiloPlus,该公司成立于2016年,生产小型但智能的ROV。
Seasam的重量为9千克,是小型,紧凑但领航的ROV和装有昂贵套件的较大ROV之间的缺失环节。这家总部位于马赛的公司的联合创始人兼首席执行官Nicolas Gambini表示,NotiloPlus正在通过计算能力来实现具有许多智能功能的小型车辆。他说:“机器学习和软件使您可以进行定位和传感。” “对于定位,您需要使用很多硬件,但是我们希望它尽可能便宜。因此,我们有一个价格低于一个高端定位传感器的价格,该系统使用较便宜的传感器,然后将它们融合并使用算法来放大数据,使其接近最完美的传感器。
“这意味着(借助Seasam),我们可以使用简单的声学传感器进行定位,并使用摄像头进行计算机视觉。计算机视觉意味着,如果需要的话,在无人机所看到的范围内,它可以识别感兴趣的点并进行触摸。”如果需要实时反馈,可以将车辆系留在绳索上,而无需系绳。 “此外,它还可以提供完全自主的潜水员跟踪或大坝或船体检查。对于长度为10m的小型船,甚至不需要地图,它本身可以识别方向舵等。对于长船体,您可以告诉它的形状和长度,然后选择自己的样式进行检查。”
该公司在里昂进行了测试,自今年3月以来一直在运送Seasam系统,现在有300台从法国到韩国的“那里”在休闲市场工作。潜水中心,以及工业,基础设施和科学检查。甘比尼说,它可以承载其他有效载荷或工具,并且可以进行调整。该公司还与TechnipFMC建立了合作伙伴关系,其中包括从事无人机工业生产等工作,以提供全球性服务。展望未来,甘比尼说,互联无人机很可能会发展整个行业。
鸟瞰
并非所有海底作业都必须由海底车辆完成。另一家新兴公司Birdview正在设计一种空中无人机,可以将传感器掉入水中以收集数据–或您可能希望海底传感器执行的任何操作。这家位于奥斯陆的公司已经与位于卑尔根的挪威海洋研究所(IMR)合作,为近海渔业提供一种遥感器,即一种无人驾驶飞机,它是从一艘渔船上发射出来的,将声纳浸入水中以查看是否存在是鱼群,然后可以告知船只应该去的地方。
Birdview的项目工程师Mohibb Malik说,该公司一直在使用市售的无人机,但现在正在开发自己的模块化系统。 Malik说:“当今可用的无人机非常适合陆上飞行,但不适用于近海海洋环境。” “我们正在设计一种不漏水的并且可以浮动的设计(如果有沟渠的话)。”目前,它正在进行的飞行时间约为15-20分钟,而其无人机的目标是3小时-在50公里范围内为了维持控制/与之沟通。
 在挪威斯塔万格附近的Tau举行的一次无人机示范活动中,Bird View展示了其想法。 (照片:Birger Haraldseid)
在挪威斯塔万格附近的Tau举行的一次无人机示范活动中,Bird View展示了其想法。 (照片:Birger Haraldseid)
马里克说,虽然该公司成立于2014年,但它实际上才活跃了大约一年,主要专注于渔业领域。这涉及使用DJ1 6叶片无人机,该无人机是从IMR的渔船在近海发射的,学习并珩磨起飞和降落。在这里,它一直在使用Simrad回声测深仪,将其从无人机的小绞盘上掉入水中以寻找鱼。回声测深仪收集数据,然后处理这些数据以显示鱼在哪里。马利克说,结果是很好的,避免了渔船在水中可能会遇到船上噪音的问题,因为它可以将声纳浸入远离船的位置。下一步是边缘分析-即在无人机上进行数据处理,以便渔民更快地知道鱼在哪里。
但是,Birdview看到了其他机会,包括浸入调制解调器以从水下传感器收集数据,甚至提供到远程遥控ROV或移动水下平台的通信链接,因此它们不必位于通信集线器的范围内。
现在,它正在研究单程50公里,半自动和全自动任务的系统。数据传输是一个挑战-当远离主机或通信网络时,可以发送较少的数据,因此,无人机的通信系统必须能够减少遥测量,但仍具有接收新任务的带宽,而无需直接进行控制。
该公司的目标是在大约一年内开始测试其自产无人机,并在大约18个月至两年内将其推向市场。 Birdview还与TechnipFMC合作。
水联系
这些系统需要传感器,而新手正在提供其中的一些。在过去的七年中,总部位于挪威特隆赫姆的Water Linked开发了超小型海底定位和水下调制解调器。水下定位系统基于倒置的短基线系统,该系统使用四个接收器和一个在诸如车辆之类的移动物体上的定位器。自2017年以来,它已与Blue Robotics迷你ROV集成在一起。
之所以很小,是因为Water Linked的重点一直放在可以对低功耗(即较小)传感器进行编号以得出相同结果的大型(即成本更高)传感器的计算上。该公司还设计了自己的传感器,并且为了保持精简,它将挪威境内的制造外包。
Water Linked首席执行官奥利弗·斯基斯兰德(Oliver Skisland)说:“我们正在做数字运算,以增加输出正确职位的机会。” “它并没有把第一个和最简单的答案当作事实,它正在做大量的计算以增加给出正确位置的可能性。” Water Linked正在使用高性能现场可编程门阵列(FPGA)来做到这一点。 Skisland解释说:“ FPGA是一种很棒的工具,因为与通用PC相比,您可以对其进行编程以针对特定任务进行优化。” “我们正在使用超现代技术来生产小型,省电且具有成本效益的产品。我们采用了一种非常集成的方法,即使是最小的组件也需要详细讨论,然后才允许其进入我们的董事会。”
 水链接定位器。图片:水链接)
水链接定位器。图片:水链接)
权力是一种折衷。 Skisland说,Water Linked的定位系统可达100m,到2020年将扩展至200m。其调制解调器的定位系统可达1km。进一步意味着更大的动力,这意味着更大的车辆。但是,这对于公司目标市场-小型ROV来说是最佳的。越来越多的人正在使用微型ROV,因为它们已经足够便宜了。 Skisland说,有了传感器,他们可以做更多的事情,例如高级导航和提供用于调查或检查工作的文档(位置数据),或者精确定位潜水员。因此,就像NotiloPlus一样,Water Linked表示它可以以与单个传感器相同的价格提供整个系统。 Skisland说:“我们正在打开一个新市场,为微型ROV提供新工具来执行以前从未做过的高级导航。”
在Tau活动上,Water Linked的定位系统被用作Oceaneering Freedom 60%规模Freedom AUV测试车上的“水下GPS”。该公司在坞站上安装了四个所谓的接收器,并在车辆上安装了一个“定位器”,它为AUV提供了1厘米的精度,可将其装进海底坞站。最佳方案是车辆和扩展坞分别具有四个接收器和一个定位器。 “然后,扩展坞会知道附近所有的AUV,所有AUV也会知道在哪里可以找到所有扩展坞。停靠站可以很容易地实施一种“着陆系统”,就像您在机场发现的那样,它可以告诉哪些AUV可以停靠,哪些AUV必须等待,” Skisland说。他说,借助水联调制解调器,可以在10m范围内传输图像,从而使飞行员能够了解正在发生的事情。
公司命中清单上的下一个是超小型多普勒速度测井仪(DVL),可帮助小型ROV或AUV保持检查或干预工作的位置。它定于2020年初发射。深度定为300m,最小高度为0.15 m,最大高度为25 mm,最小外形尺寸为55 mm。
水me
在车辆或资产之间提供通信链接是另一个新手– Hydromea。该公司的创始人Felix Schill(CTO)和Alexander Bahr(COO)早在2003年就开始设计一群微型AUV。在走了自己的路后–一种是在麻省理工学院做水下导航的博士学位,另一种是他们在澳大利亚堪培拉的澳大利亚国立大学获得水下网格网络通信博士学位,然后他们一起来到了瑞士洛桑联邦理工学院(EPFL),在那里他们又开始着手研究微型AUV。
但是,在尝试建造它们时,他们意识到找不到足够小的推进器,耐久的电池和小的声学调制解调器。此外,德国的阿尔弗雷德·韦格纳研究所(AWI)要求他们扩大光通信工作,并开发一个独立的部门。该公司首席执行官伊戈尔·马丁(Igor Martin)说,他们的LUMA 500ER现在可在120度视锥范围内以70m的范围提供500kbs(每秒千比特)的数据速率。但是他说,他们认为可以在更远的距离上扩展到每秒几兆比特。
马丁说:“现在我们看到,随着您将物品小型化,它变得更加负担得起。” “它使您可以灵活地进行改造。它具有便携性和可扩展性。与其花费数万美元,不如花费数万美元,它创造了不同的机会。借助Water Linked和Hydromea等公司的小型便携式系统,您可以在拥有便宜的调制解调器,工具或传感器系统的环境中扩展规模。”
该公司一直在石油和天然气技术中心的TechX加速器计划中,并已看到其光通信技术被Rever Offshore,Ocean Installer和i-Tech 7用于诸如陀螺仪箱将侧倾/俯仰/偏航数据传输到观测ROV的任务。例如,海底建筑项目旨在为甲板上的起重机操作员提供有关海底状况的更快信息。
 Hydromea的LUMA调制解调器。 (照片:Hydromea)
Hydromea的LUMA调制解调器。 (照片:Hydromea)
Rever Offshore于2019年初在北海道达尔(Total)的一个钻探项目中,将Ruma调制解调器作为Ashtead技术自主监测系统(AMS +)的一部分由Rever Offshore部署在了井口现场。然后,ROV可以使用LUMA从AMS +获取数据。 ,距井口8m。
2019年晚些时候,研究船Sonne的阿尔弗雷德·韦格纳研究所和马克斯·普朗克海洋微生物研究所进行的科学巡航使用了Geomar的ROV KIEL6000上的LUMA调制解调器与4000m水深的海底仪器以及LUMA调制解调器直接通信,以确保他们的传感器正在工作,并在必要时对其进行重新配置。
凭借其在过去10年中建立的包括LUMA在内的技术,Hydromea现在将注意力转向制造微型,无系绳的半自动水下无人机,称为ExRay。它的设计目的是能够在充满水的密闭空间(例如船上的压载水舱)内操作。其目标是能够使用同时定位和地图绘制(SLAM)导航坦克,并使用镶嵌软件生成需要维护区域的3D热图。第一款ExRay将于2021年推出。

开发的ATLANTIS着陆器上。图片来源:EdgeLab")

和30千瓦时(266伏直流)。图片来源:Ictineu Submarins SL")





-168169 "庆祝为客户 Jan De Nul 完成首辆商用 Quantum 电动汽车的现场验收测试(图片来源:SMD)")

期间,一艘美国海军全球自主侦察艇(GARC)在大西洋进行机动演练。“联合海上联合演习”是世界上持续时间最长的多国海上联合演习的第66届。(美国海军官方照片)")