好的海底车辆采用小包装
-109905 "Riptide AUV(信贷BAE系统)")
-109906 "三叉戟ROV(信用SOFAR海洋)")
-109907 "珊瑚礁上的游骑兵(马修·邓巴宾/ QUT)")
假期刚刚过去,许多人可能已经听说过“好东西装在小包装中”。这对于当今的海底车辆是否成立?确实如此。近年来,该领域最引人注目的趋势之一是紧凑型和负担得起的但高效的海底车辆的普及。在过去的十年中,出现了可以由一个人轻松携带和部署的新型远程操作车辆(ROV)和自动水下机器人(AUV)。这些小型车辆利用了受消费电子行业启发的电路,传感器和电池方面的发展,在实际应用中突破了自己的重量等级。
ROV和AUV的例子很多,但可以作为例子,但有四个例子值得回顾。他们还对一些关键的技术和操作选择提供了不同的观点。对于ROV而言,Sofer Ocean Trident可能代表紧凑性能和设计优化的巅峰之作。蓝色机器人技术恰当地命名为BlueROV,它提供了一个更灵活的选择。在AUV中,BAE Systems Riptide微型汽车展示了高度工程化的“经典”方法,尽管软件外观非常灵活。昆士兰科技大学的新成员RangerBot提出了一种新颖的范式更改,以降低特定用例的成本。
从ROV开始,Blue Robotics的BlueROV呈现出典型的ROV尺寸。该车辆的设计与大型ROV或研究型ROV一样,具有开放式框架,可容纳电子设备和电池盒,推进器,浮力泡沫和压舱物。这种简单的设计是健壮,可扩展的,并且是本领域完全熟悉的。该系统提供六和八推力器配置,许多可选附件以及显着的性能和灵活性。但是新颖的降低成本和管理复杂性的方法使它成为了改变游戏规则的人。
为了降低成本,BlueROV出厂时已部分组装,估计需要六到十二个小时的用户组装才能完成。虽然这对买方来说是节省成本的方法,但同时也为客户提供了了解组件和系统架构的机会。这支持用于最终用户修改和升级的工具。该车辆利用常见的无人机技术并采用开源ArduSub控制固件,既提供有用的功能,又提供广泛的用户社区。操作员使用便携式计算机和游戏控制器控制ROV。开源QGroundControl应用程序提供了用户界面。这种强大的技术组合以3500美元的低价提供。这为真正的新受众群体带来了真正强大的ROV。
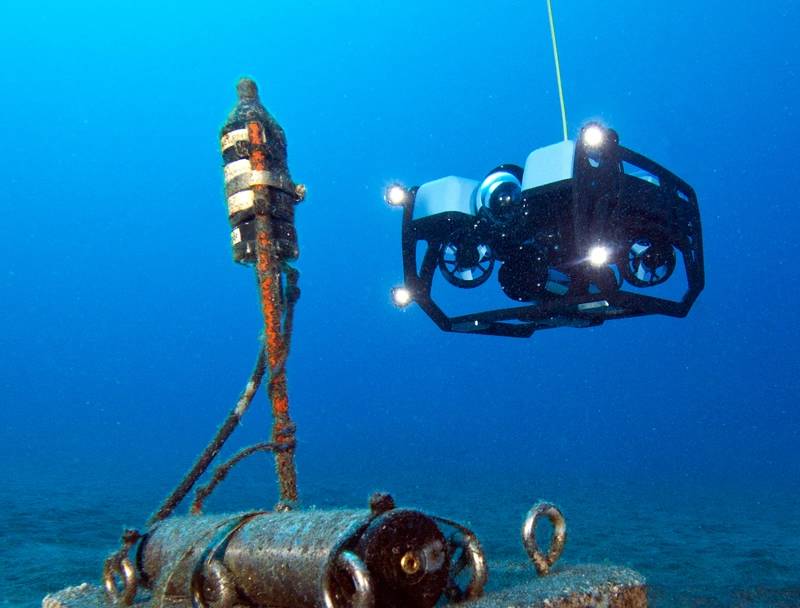 BlueROV(信誉蓝色机器人技术公司,Jeff Milisen)也扩大了ROV的受众群体,它是来自Sofar Ocean的Trident(前OpenROV)。这种紧凑的ROV是工程优化中的案例研究。它的外形和架构是从其他电池供电的ROV的重大改进。 Trident的独特设计结合了ROV(遥控车辆)的多功能性和控制能力以及AUV(自主水下航行器)的效率。它可以在狭窄的空间中执行扩展的线性样线和复杂的操作。 ROV仅需使用三台推进器,就可实现独特的偏移配置,可以有效地向前推进,但操纵却非常精细。 ROV的偏离中心的垂直推进器会使其在高速时倾斜,但在低速运行时也会悬停或改变深度而不会倾斜,这类似于传统ROV的工作方式。除了优雅的流体动力设计外,Trident还设计了Trident具有高度的便携性和耐用性。 ROV足够小,可以放在背包中,而其侧板则用橡胶涂层模制而成,具有某种形式的保险杠。用户界面基于诸如HTML5和WebGL之类的互联网标准,可以仅通过在笔记本电脑,平板电脑和移动设备上运行的浏览器进行导航。现代软件开源方法的采用确保了社区和公司都可以不断更新代码库。这允许用户驱动软件更改,例如新的用户界面,以塑造操作体验,并向全球Trident社区交付改进的ROV功能。
BlueROV(信誉蓝色机器人技术公司,Jeff Milisen)也扩大了ROV的受众群体,它是来自Sofar Ocean的Trident(前OpenROV)。这种紧凑的ROV是工程优化中的案例研究。它的外形和架构是从其他电池供电的ROV的重大改进。 Trident的独特设计结合了ROV(遥控车辆)的多功能性和控制能力以及AUV(自主水下航行器)的效率。它可以在狭窄的空间中执行扩展的线性样线和复杂的操作。 ROV仅需使用三台推进器,就可实现独特的偏移配置,可以有效地向前推进,但操纵却非常精细。 ROV的偏离中心的垂直推进器会使其在高速时倾斜,但在低速运行时也会悬停或改变深度而不会倾斜,这类似于传统ROV的工作方式。除了优雅的流体动力设计外,Trident还设计了Trident具有高度的便携性和耐用性。 ROV足够小,可以放在背包中,而其侧板则用橡胶涂层模制而成,具有某种形式的保险杠。用户界面基于诸如HTML5和WebGL之类的互联网标准,可以仅通过在笔记本电脑,平板电脑和移动设备上运行的浏览器进行导航。现代软件开源方法的采用确保了社区和公司都可以不断更新代码库。这允许用户驱动软件更改,例如新的用户界面,以塑造操作体验,并向全球Trident社区交付改进的ROV功能。
这个易于使用的高性能软件包在亚马逊上的售价为1,700美元。对于可访问且有用的海洋机器人而言,这确实是一个新时代。那些希望获得共享体验的用户可以选择高度优化的系统或具有更多最终用户可配置性的模块化方法。无论哪种情况,只要花费一台现代笔记本电脑或PC的费用,就可以配备齐全的设备来执行有意义的任务,执行水深达100米的任务。那些愿意“切断电源线”的人还有其他选择。
近年来,有效的AUV变得更小,更实惠。与他们的ROV表亲一样,有多个示例可供考虑。现代的“微型” AUV可能与BAE Systems的产品(以前为Riptide Autonomous Solutions)最佳结合。激流是关于小型车辆和快速增长的故事。成立于2015年的Riptide迅速提供了紧凑型AUV产品。
激流号的第一个产品是微型UUV,这是一种高度灵活的开源开源水下机器人,可提供最先进的低成本解决方案,非常适合自治和行为,海底传感器和其他新型有效载荷的开发人员。微型UUV具有开放的硬件和软件接口,为用户提供了可靠而强大的平台来推进技术开发。车辆设计经过优化,具有同类最佳的水动力特征,可实现高效率。微型Micro-UUV的直径为4 7/8英寸,长度为40英寸,重22磅。标准系统的额定深度为300米。
尽管这款车看起来像“典型”的行业产品,但它的独特之处不仅在于体积小。在软件设计中,对最终用户需求的关注最为普遍。与典型的专有架构相比,微型UUV具有灵活的架构,可利用大量的开源软件。在微型UUV软件的最初版本中,Riptide提供了Arduino和Beaglebone Black开发平台的代码,以及对MOOS-IvP机器人控制引擎的支持。这是任何AUV的强大功能集。起价在15,000美元左右,引起了巨大的市场兴趣。
到2019年,BAE Systems注意到该产品的成功。 BAE Systems FAST Labs组织收购了Riptide,目前正在使平台技术和规模制造成熟。 FAST Labs是BAE Systems,Inc.的研发部门,在
国防工业作为内部的,由客户资助的研发业务,旨在
在公司的全球企业中进行合作以开发和过渡先进技术。 Riptide最初推出的微型AUV将从这一过程中受益。
RangerBot是最近出现的另一个小型AUV。该车辆采用不同的方法为最终用户提供价格合理的解决方案。 RangerBot是由澳大利亚布里斯班的昆士兰科技大学(QUT)的工程师设计的。 QUT的团队在专注于机器视觉的机器人中心工作。他们还致力于支持大堡礁的环境评估。当团队意识到目标环境中的水状况非常清晰时,他们选择采用基于视觉的传感技术,从而实现了关键的范式转换。
 礁石上的RangerBot(信贷人Matthew Dunbabin / QUT)这听起来似乎很明显,但放弃了声学仪器的尺寸,功率和最显着的成本损失,RangerBot变得更小,更易于使用,并且比典型替代品更实惠。使用一系列摄像机,RangerBot可以管理其在底部的水平路线以及深度。使用最新的照片镶嵌工具,车辆还可以在调查站点上生成有用的数据产品。视觉系统还可以用于复杂的环境管理应用程序.RangerBot及其前身原型已被证明能够识别荆棘冠海星(COTS),这是一种可以破坏珊瑚礁的掠食者。 AUV还展示了携带有效载荷的能力,该载荷可以通过精确注入仅危害侵入生物的溶液来消除COTS。支持该任务的有效载荷接口也有助于珊瑚礁的恢复。 RangerBot上可以安装最多8升珊瑚幼虫的膀胱。利用其自动视觉功能,AUV可以识别退化珊瑚礁上的适当裸露空间,并沉积适当浓度的幼体。因此,满载的RangerBot可以播种约250平方米的礁石。这比以前的基于潜水员的技术更有效。
礁石上的RangerBot(信贷人Matthew Dunbabin / QUT)这听起来似乎很明显,但放弃了声学仪器的尺寸,功率和最显着的成本损失,RangerBot变得更小,更易于使用,并且比典型替代品更实惠。使用一系列摄像机,RangerBot可以管理其在底部的水平路线以及深度。使用最新的照片镶嵌工具,车辆还可以在调查站点上生成有用的数据产品。视觉系统还可以用于复杂的环境管理应用程序.RangerBot及其前身原型已被证明能够识别荆棘冠海星(COTS),这是一种可以破坏珊瑚礁的掠食者。 AUV还展示了携带有效载荷的能力,该载荷可以通过精确注入仅危害侵入生物的溶液来消除COTS。支持该任务的有效载荷接口也有助于珊瑚礁的恢复。 RangerBot上可以安装最多8升珊瑚幼虫的膀胱。利用其自动视觉功能,AUV可以识别退化珊瑚礁上的适当裸露空间,并沉积适当浓度的幼体。因此,满载的RangerBot可以播种约250平方米的礁石。这比以前的基于潜水员的技术更有效。
受到这些成功研究工作的启发,昆士兰理工大学的团队已经优化了RangerBot设计用于生产,并准备支持商业化工作。当该产品变体上市时,它将提供一个强大的解决方案,将AUV自由游泳效率与ROV的可操纵性水平以及先进的检验和检查功能结合在一起。需要注意的是,水的清晰度必须足够高才能使视觉技术正常工作。但是,全球海洋中有许多这样的操作环境。
提供此处提供的示例可验证“优质海底车辆采用小包装”的说法。 ROV和AUV用户可以找到许多选择,包括此处讨论的系统之外的其他选择。这些发展的趋势包括更多地采用开源软件,现代生产工具以及其他领域(尤其是消费电子产品)的成本优势。创新思维和清洁纸设计的影响也很明显。此处介绍的车辆以及该领域中的许多其他紧凑型产品,都受益于该行业的新个人或组织的思想。摆脱旧技术或设计观念似乎是使较小的海底车辆社区发展的一个好主意。



“尼尔·阿姆斯特朗”号研究船上的研究人员部署了海洋观测系统,用于收集真实世界的环境数据,以支持业务决策、建模和长期海洋监测。© WHOI")
")

的一个新物种,该属蠕虫俗称蛛丝虫。考察科学团队测试了一项新技术,该技术为科学家提供了一种新的、非侵入性的方式来研究这些奇特的动物。图片来源:ROV SuBastian / 施密特海洋研究所")

(图片来源:Vard)-171000 "VARD 9 42 设计的 RV11000(Inkfish 版本)(图片来源:Vard)")
-170484 "(图片来源:Van Oord)")

带着她的小鲸鱼。图片来源:新英格兰水族馆,根据美国国家海洋和大气管理局(NOAA)许可证#25739-01拍摄。")