集成式多域端口安全
。图片来源:Ocean Aero")
澳大利亚联邦警察指挥官指出,去年澳大利亚截获了数十亿件毒品,他说:“无论这些犯罪分子如何耍花招,我们的信息很明确——我们已经盯上你们了。”
Lemvos Robotics公司正致力于解决这一难题。该公司研发的LM450多用途无人水面艇(USV)支持声呐、ROV/AUV发射系统和无人机对接,可执行环境监测、国防/安全和海底测绘等任务。它可通过卫星或5G网络进行远程或半自主操作,有效载荷超过300公斤,并可连续执行任务数周。
Lemvos联合创始人丹尼尔·塞弗林森表示,在船体毒品检测方面,这种水下机器人比潜水员的部署速度快得多,因此安保部门可以更主动地检查可疑目标。该机器人的一项关键特性是其远程自主对接能力。“对于短途任务,人员下水到达船只所需的时间可能与任务本身的时间一样长。在这种情况下,自主对接就非常有用。人员可以登录电脑并立即开始操作机器人。”
Wavefront 入侵检测系统全球业务发展经理 Simon Goldsworthy 表示,对边境安全构成最新、最强大威胁的因素之一是无人驾驶车辆从水面下隐蔽接近,而应对这种威胁需要持续的自主多域态势感知和响应能力。
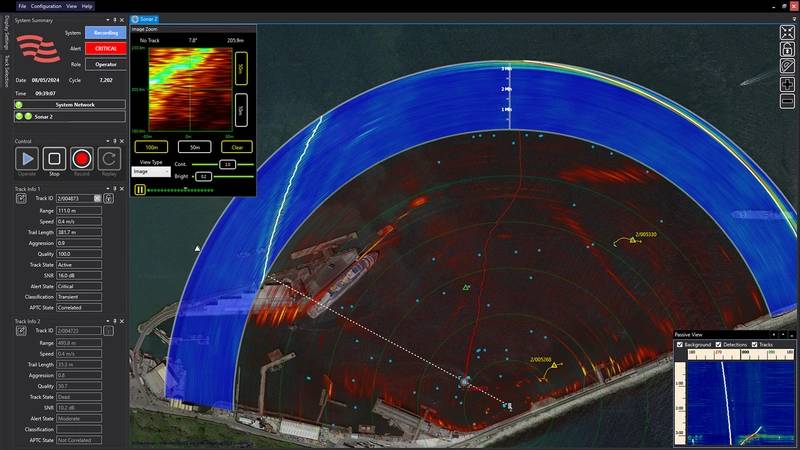
Wavefront Systems、MARSS 和 Forcys 近日在英国波特兰港举办了一场为期一周的联合水下和多域安全系统演示。观察员们实时目睹了威胁的演变过程:Wavefront 的 Sentinel 入侵探测声呐 (IDS) 和 MARSS 的 NiDAR 指挥控制平台协同工作,探测、跟踪、分类并应对来自水下和空中的各种敌对事件。
NiDAR 是一个与传感器无关的多域监控和安全平台,它集成了来自各种传感器的数据,包括声纳、雷达、射频和光电/红外传感器。
该演示展示了使用 Wavefront 的 SInAPS 系统,在跟踪低目标强度无人机或在某些港口典型的高度杂乱的海底条件下移动速度非常慢的目标时,整合被动和主动声呐数据的强大能力。
“SInAPS的真正优势在于它能够对威胁进行分类并确定其位置,而这在以前需要花费更长的时间才能识别,”Goldsworthy说道。“对于我们的客户而言,其独特的优势在于,无论威胁位于何处,现在都可以‘听到’它。这适用于任何藏身于隐蔽区域或反射主动声呐信号的地方的入侵者——例如,传统声呐解决方案难以探测的管道或港口堤坝。Sentinel的SInAPS技术还能够通过单个传感器,提供对潜水器和无人机目标的卓越跟踪能力。”
 Wavefront公司的Sentinel IDS声呐头正从一艘充气艇上部署。图片来源:Wavefront
Wavefront公司的Sentinel IDS声呐头正从一艘充气艇上部署。图片来源:Wavefront
 Wavefront Sentinel IDS 软件截图,显示了通过主动和被动声呐追踪潜水员的过程。图片来源:Wavefront
Wavefront Sentinel IDS 软件截图,显示了通过主动和被动声呐追踪潜水员的过程。图片来源:Wavefront
 Wavefront 的 Sentinel IDS 远征预告片。图片来源:Wavefront
Wavefront 的 Sentinel IDS 远征预告片。图片来源:Wavefront
去年底,海洋动力技术公司(OPT)宣布与Mythos AI建立合作伙伴关系,旨在将先进的人工智能驱动型自主软件集成到OPT的WAM-V型自主水面航行器(ASV)船队及其PowerBuoy充电平台中。此举旨在加速公司向国防、安全和商业领域的客户提供集成式空中和水下解决方案的范围。该系统将利用实时边缘处理、多传感器融合和自适应学习技术,以增强态势感知、避障、多航行器协同,并在后续阶段实现更高级的航行器-浮标协同。
OPT公司高级副总裁兼商业销售主管杰森·韦德表示,防御无人系统极具挑战性,因此许多港口现在都将重点放在变化检测上。然而,每个港口面临的难题各不相同,因此解决方案也需要根据实际情况进行调整。PowerBuoy系统的一项关键优势在于,它可以提供远离海岸的雷达和摄像头视角,从而扩大国土安全部和美国海岸警卫队等机构的决策范围。“这改变了威慑策略。例如,如果一艘船在近海倾倒毒品,他们现在就必须采取不同的措施。有时,仅仅是安装这些传感器就能改变对方的行为。”
去年,海湾港务局采用了Ocean Aero公司的Triton自主水下及水面航行器(AUSV)。该AUSV利用包括测深仪、侧扫声呐和磁力计在内的多种水下有效载荷进行持续扫描,生成高分辨率对比数据集,用于实时变化检测。该项目旨在检测港口交通和基础设施的异常情况,港口首席执行官Jon Nass表示,这项功能有望为港口节省数百万美元。此外,它还能在飓风后的恢复工作中发挥关键作用,识别极端天气事件过后港口基础设施的碎片和潜在威胁。确保航道和港口畅通无阻对于港口的快速重新开放至关重要。
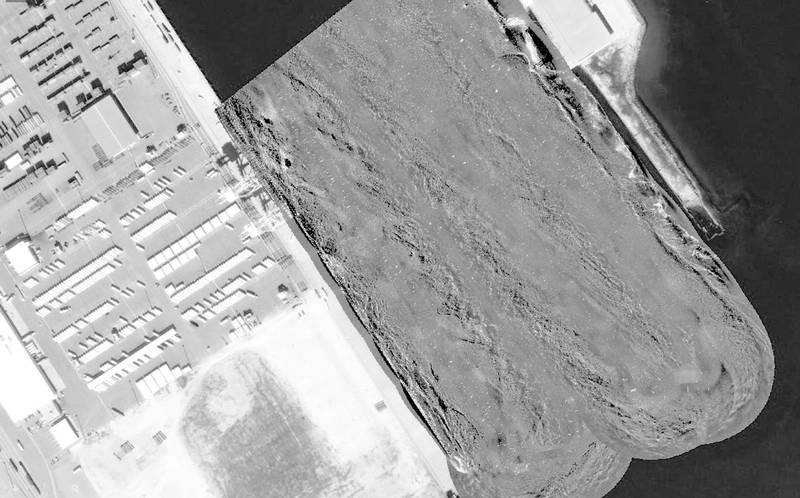 Ocean Aero公司的AUSV利用包括测深仪、侧扫声呐和磁力计在内的多种水下有效载荷进行持续扫描,以生成高分辨率对比数据集,用于实时变化检测。图片来源:Ocean Aero
Ocean Aero公司的AUSV利用包括测深仪、侧扫声呐和磁力计在内的多种水下有效载荷进行持续扫描,以生成高分辨率对比数据集,用于实时变化检测。图片来源:Ocean Aero
Boxfish Robotics公司的自主水下航行器(AUV)正在为新西兰奥克兰港提供另一种应用场景——港口水域环境修复——的变化检测。朗伊托托海峡持续的港口健康监测和环境合规性要求进行可重复的海底视频断面测量,并具备足够的图像质量和定位精度,以支持环境评估和长期对比。Boxfish公司的市场和销售经理Vera Bronza表示,传统的测量方法,包括潜水员调查、拖曳式摄像系统和系留式遥控潜水器(ROV),难以提供一致的高度、光照和空间重复性,尤其是在水流湍急的情况下。
海底断面调查采用悬停式“箱鲀”自主水下航行器(AUV)进行,该航行器被编程为自主导航,在朗伊托托海峡预设航点之间航行。任务事先规划,无需系绳或人工操控,完全依靠船载导航系统执行。相同的任务可以间隔数月甚至数年重复进行。这种一致性支持时间序列监测和变化检测,而这正是许多科学和监管项目的核心需求。
布朗扎表示:“我们看到全球港口都在努力增加恢复区的生物多样性,以提高其可持续性。我们的自主水下航行器是进行底栖生物调查的有效工具,可以确保这些变化是积极的。”
该自主水下航行器(AUV)还可以经过训练,识别入侵物种,包括船体上的入侵物种,并可配备机械臂将其移除。此外,它还可以配备专门设计的照明设备,用于检查海底舱,因为在这些舱室中,入侵物种、毒品或其他非法物品可能难以被发现。
 Boxfish Robotics公司正在部署其自主水下航行器(AUV)。图片来源:Boxfish Robotics
Boxfish Robotics公司正在部署其自主水下航行器(AUV)。图片来源:Boxfish Robotics
 Boxfish Robotics公司为港口水域的环境修复提供变化检测服务。图片来源:Boxfish Robotics
Boxfish Robotics公司为港口水域的环境修复提供变化检测服务。图片来源:Boxfish Robotics
深的海底热液喷口烟囱采集地质样本。科学家在大西洋探索最少的区域之一——赤道无风带巨型转换断裂带——发现了两个新的海底热液喷口区。这个大型的、构造活跃的系统横跨大西洋中脊,而大西洋中脊构成了世界上最长的山脉。这类喷口区因其混合的“管道”系统而十分罕见,其特点是典型的……")



“尼尔·阿姆斯特朗”号研究船上的研究人员部署了海洋观测系统,用于收集真实世界的环境数据,以支持业务决策、建模和长期海洋监测。© WHOI")
")

的一个新物种,该属蠕虫俗称蛛丝虫。考察科学团队测试了一项新技术,该技术为科学家提供了一种新的、非侵入性的方式来研究这些奇特的动物。图片来源:ROV SuBastian / 施密特海洋研究所")

(图片来源:Vard)-171000 "VARD 9 42 设计的 RV11000(Inkfish 版本)(图片来源:Vard)")
-170484 "(图片来源:Van Oord)")
