沿海环境管理的无人机

-98202 "EagleRay游戏中时光倒流从海上过渡到天空(Credit NCSU)")
EagleRay游戏中时光倒流从海上过渡到天空(Credit NCSU)
-98203 "蒙特利湾的VTOL无人机。 (信用:MBARI)")
蒙特利湾的VTOL无人机。 (信用:MBARI)
-98204 "商业调查Hexacopter演示。 (图片来源:J。Manley)")
商业调查Hexacopter演示。 (图片来源:J。Manley)
无人机系统(UAS),通常被称为无人机,在海事领域的影响越来越大。随着这些平台的功能增加,他们对海事科学,国防和工业的贡献也在增加。认识到这一点,沿海技术联盟(ACT)和东北地区海岸和海洋观测系统协会(NERACOOS)在美国综合海洋观测系统(IOOS)的支持下,召开了无人机实用用途研讨会,以解决管理问题。 2018年底,位于缅因州韦尔斯的Wells国家河口研究保护区(WNERR)的沿海地区存在问题。该研讨会旨在促进信息共享和最佳实践,以支持无人机在沿海管理中的迅速扩大应用。
研讨会摘要
研讨会的目标是总结研究和监测级UAS的技术状况,汇编该领域当前使用的示例,了解与UAS相关的局限性和后勤挑战,制定运营和数据管理/分析最佳实践,并描述了沿海海洋观测系统的未来发展和应用。可从ACT网站(www.act-us.info)获取综合研讨会报告。
该研讨会还探讨了沿海海洋环境中真正定量多光谱和高光谱遥感的挑战,以及在公共和私人土地和海洋空间使用无人机所涉及的法律和隐私问题。
为了促进广泛的投入和跨部门的信息共享,研讨会参与者包括私营部门UAS技术开发商和服务提供商,开发和/或使用UAS的学术研究人员,以及具有使用UAS经验的政府机构工作人员或
UAS数据或处理可通过UAS解决的管理问题。
研讨会的第一天展示了三种UAS的现场演示:四轴飞行器,固定翼和六轴飞行器。
第二天和第三天是小组会议,其中包括以下主题:
•无人机调查栖息地
•在佛罗里达州进行有害藻华(HAB)检测和监测的无人机
•无人机作为在东海岸,墨西哥湾沿岸和西海岸三个地点测量潮汐沼泽的工具
•在蒙特利湾使用无人机进行沿海/近海断面和其他研究
•开发在空气和海洋环境中运行的无人机
 Wells National Estuarine Research Reserve欢迎无人机。 (图片来源:J。Manley)
Wells National Estuarine Research Reserve欢迎无人机。 (图片来源:J。Manley)
每个小组会议之后都会进行分组讨论。全体会议包括来自突围小组的报告以及小组讨论和突破性主题。介绍和讨论的主要内容信息如下:
•虽然UAS是沿海管理的新工具,但它们的价值已被证明适用于各种应用,如栖息地测绘,野生动物监测,珊瑚褪色检测,贝类管理,海洋碎片检测,海岸线变化监测,海滩管理和沙子资源,测绘洪水区,以及桥梁和其他结构的检查。
•UAS还可用于许多其他管理环境,例如有害藻华(HAB)检测和跟踪,人/动物相互作用监测,水质监测,污染物跟踪和监测潮汐沼泽稳定性。
•管理人员急于使用无人机,但如何使用无人机并不总是很好理解。重要的是首先询问“管理问题或问题是什么?”这将确定需要哪些数据以及如何收集这些数据,这些数据可能是无人机。
•与任何数据一样,无人机数据需要转换为信息,然后可用于管理。
•使用无人机获取准确的定量地理空间数据具有挑战性,需要先进的技术技能和知识。通常需要雇用无人机操作和数据处理方面的专家。
•使用无人机收集地理空间数据的最佳做法已经确立。有关最佳实践的指南可在诸如PrecisionHawk电子书Beyond the Edge和USGS无人机系统数据管理计划2015等出版物中找到。
•研讨会参与者发现由于电池限制而导致的短飞行时间是目前无人机技术的最大限制之一。其他所需的技术改进包括扩展的有效载荷能力,模块化以允许无人机携带不同的有效载荷/传感器,全天候能力,具有态势感知的“智能”无人机,增加的数据存储容量,数据类型的标准化,数据管理的改进,如 - 数据处理,以及超越图像和遥感的功能,例如部署水样采集设备。
•法律法规限制无人机在海洋和沿海研究和管理中的使用。例如,无人机只能在400英尺以下飞行,并且必须始终保持在飞行员的视线范围内。每架无人驾驶飞机必须由专门的许可飞行员驾驶,这意味着无人驾驶飞机无法控制多架无人驾驶飞机。另一个重要的考虑因素是法律法规潜在变化的不确定性使得研究计划变得困难。
•由ACT等独立实体对UAS平台和传感器进行测试和评估对研究人员,管理人员和技术人员非常有用。
技术亮点
研讨会上提出了几项创新技术。所有无人系统的一个关键问题是有效载荷。在这次研讨会期间,蒙特利湾水族馆研究所(MBARI)的研究人员讨论了混合式三旋翼固定翼飞机Flightwave Edge的使用。它可以使用垂直起飞和着陆(VTOL)技术起飞和降落。它还可以无缝地从悬停转移到前飞,然后再返回。其可更换的扭锁有效载荷系统允许操作员使用单架飞机飞行多个任务。 MBARI操作员使用这种无人机与FLIR成像仪结合进行热前沿映射。他们还使用非常高分辨率的相机,能够识别水中的动物,在这个例子中是水母,以及飞行中的鸟类。
除了MBARI和其他科学用户的实地结果外,研讨会还提出了可在空中和水下操作的无人机的新思路。北卡罗来纳州立大学提出了跨域自动驾驶汽车(XAV)的概念。通过DARPA赞助以及与Teledyne Scientific的合作,该团队制造了一种可以飞行和游泳的固定翼无人机。这个名为EagleRay的系统在2015年至2016年间进行了广泛的开发和测试.IagleRay车辆是基于固定翼VTOL设计的UAV-UUV混合动力车。已经建立了两次迭代并展示了完整的游泳 - 飞行 - 游泳循环。版本2包括自动驾驶仪硬件和用于自主操作的传感器。被动式可浸水/可排水的隔间允许车辆达到近中性浮力,但在出口时迅速排出压载水。还测试了两种主动浮力补偿器设计。螺旋桨推进由无刷电动机驱动。已经测试了单独的空气和水推进以及两用系统
研讨会上讨论的另一项新技术是来自Igloo Innovations的SeaHawk。这种新颖设计有两种变体,SeaHawk Alfa和SeaHawk Chimera。阿尔法看起来很像典型的四轴飞行器,并且在空中表现相似。与四轴飞行器不同,阿尔法是一个可拆卸的浮标,包含到控制站的无线遥测。当车辆淹没时,浮标保持在表面上并系在车辆上,从而保持通信。可以移除浮标以进行完全自主的水下操作。阿尔法的有效载荷能力为5千克(10磅),最大飞行速度为60千米/小时(37英里/小时)。专用的水下推进系统在浸没时以高达4节的速度移动阿尔法。它的操作深度为50米(150英尺),在任何一种介质中都可以运行大约60分钟。奇美拉看起来与阿尔法相似,只是车辆停留在地面,只有有效载荷部署在水下。该车辆的有效载荷容量高达20千克(40磅),旨在作为模块化平台,承载比阿尔法更广泛的有效载荷。例如,有效载荷可以是提供高级水下能力的ROV或AUV。嵌合体也可以悬停在水面上并降低采样装置以收集样品,对水面的干扰最小。
ACT研讨会上对新兴技术的讨论,演示和介绍令人印象深刻。有兴趣了解更多信息的读者可以联系ACT。
 上下:SeaHawk飞行/游泳无人机(学分:Igloo创新)
上下:SeaHawk飞行/游泳无人机(学分:Igloo创新) 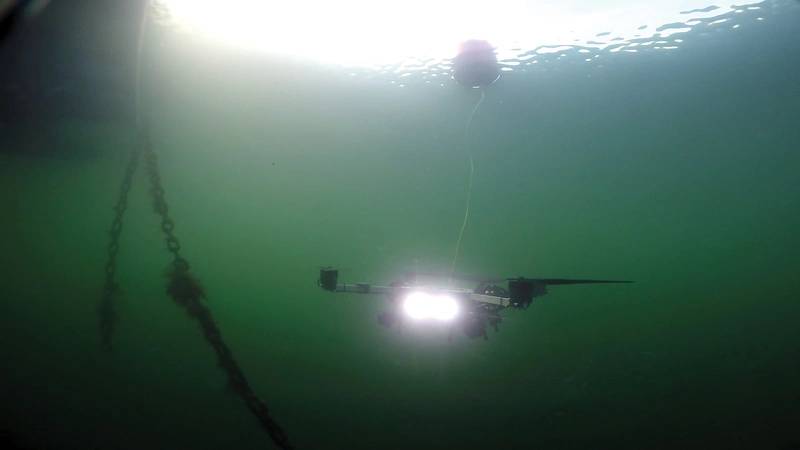
https://magazines.marinelink.com/nwm/MarineTechnology/201903/
-(AIMS)-开发的立体-164623 "配备摆动吊臂和绞盘的船只非常适合部署和回收诱饵远程水下视频 (BRUV) 系统。这张照片中,由澳大利亚海洋科学研究所 (AIMS) 开发的立体 BRUV 系统被下放到海底。BRUV 对海底生物群落或海床的影响极小。图片由西澳大利亚大学海洋生态学组 - 鱼类研究提供")




-164181 "(图片来源:辉固)")
-164057 "挪威海的 Åsgard B 平台(图片来源:Gudmund Nymoen / Equinor)")




