

发明的MUM(和女儿):海仙女和MUM正在激发新一代的水下系统和车辆。伊莱恩马斯林看了看。
进入水下领域的申请人名单正在快速增长。这些概念各不相同,从能够长距离携带一系列有效载荷的水下自主母舰到可以找到预先编程位置的大量水下部署海底节点。
能源:连接,正如奥斯陆的Subsea Valley集群和年度会议现在被称为,其中一些概念被概述,包括来自两家挪威技术公司和德国Thyssenkrupp的公司,这是一家更习惯于设计海军潜艇系统的公司。
uSEA推出了uLARS
其中一家挪威技术初创公司uSEA正在提出一种混合动力系统,通过海底和地面无人机组合来破坏现有的载人舰艇支援海底作战。
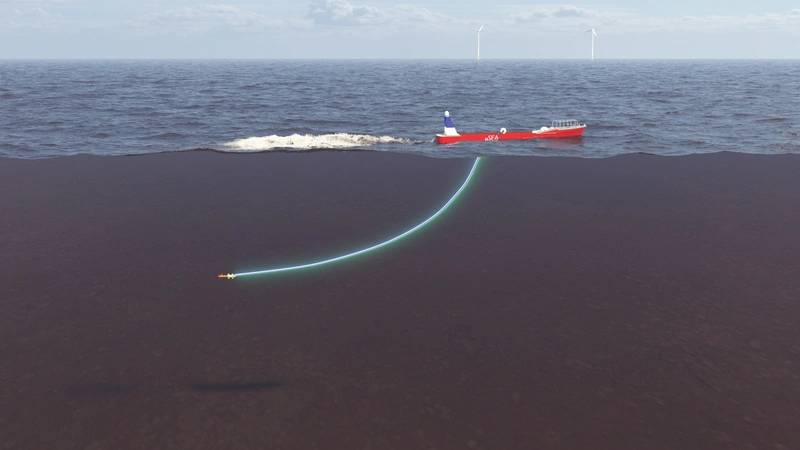
uSEA成立于2017年,从那时起,它一直在开发一种水面无人机或无人水面舰艇(USV),以支持水下无人机(即自主水下航行器或AUV),从而不再需要载人飞船,可以充电。在水中完成,避免发射和恢复操作。这使得它与其他表面无人机概念不同,后者倾向于依靠AUV或遥控操作车辆(ROV)的完全恢复来进行充电。 uSEA的系统被称为uLARS(LARS意为发射和恢复系统),用于水下无人机,uSEA首席执行官Felipe Lima说,他曾在Subsea 7,Aker Solutions和Xodus Group工作之前曾在巴西海军服役。
这是一个自然的进展。利马说,今天的AUV越来越有能力和可靠。 “他们占据了ROV后院的空间。但是,他们有一个限制;他们依靠电池,因为他们没有像ROV那样接线,他们仍然需要母舰,例如。调查船,因为他们的电池在12-48小时内耗尽。使用AUV的移动扩展坞,您不需要依赖海底的扩展坞,也不需要更大的水面船。“
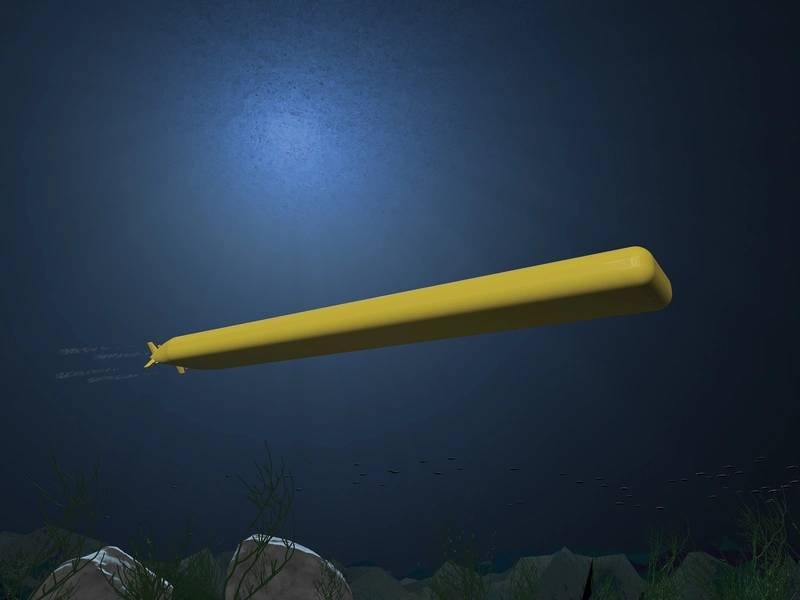
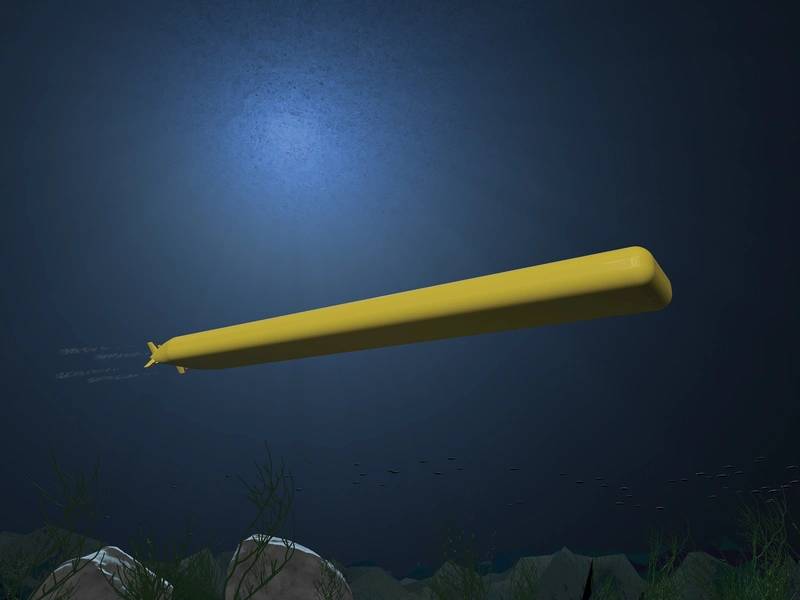
 uSEA的uLARS水下对接接口(图片来源:uSEA)
uSEA的uLARS水下对接接口(图片来源:uSEA)
该系统包括一个潜水式牵引头,带有一个用于充电和数据传输的感应连接器,其作用有点像战斗机的空中加油。 “这意味着波浪的影响微乎其微,因为对接处于可控深度,”利马说,他拥有阿伯丁大学海底工程硕士学位和奥斯陆大学创新与创业硕士学位。还有一个基于月球池的处理系统,用于安全地恢复甲板上的AUV。
该系统将支持浅水区以及深水和超深水域的海底勘测,操作各种有效载荷,从侧扫声纳和多波束回声探测器等更传统的类型到合成孔径声纳等更先进的有效载荷。
uSEA正在寻找合作伙伴来完成资格认证计划,该计划预计将在明年年底(2020年)完成。在此之后,该公司正在瞄准海上业务,并且正在寻找在2021年开展的试点项目。
海洋中的iDROP
另一家挪威技术公司iDROP计划通过其自主的Oceanid节点破坏海底地震技术市场。 iDROP的系统基于单独的圆柱形传感器节点(以希腊海洋若虫命名),使用重力和压载物移位进行推进和位置控制,降落在海床上的特定预先计划的位置,它们落在铝腿上在他们降落之前弹出。
 一个iDROP的Oceanid。在希腊神话中,Oceanids是若虫,他们是Titans Oceanus和Tethys的3000个女儿。 (图片:iDROP)
一个iDROP的Oceanid。在希腊神话中,Oceanids是若虫,他们是Titans Oceanus和Tethys的3000个女儿。 (图片:iDROP)
这个想法是它们可以分组部署,在海床上形成网格图案以进行地震勘测。船上电池为下降控制器供电(仅使用电池的5%),数据采集(180天)并触发释放30kg压载物的机制 - 由盐浆制成 - 允许装置滑回地面,再次,在控制之下,他们瞄准预期的目标。然后采用浮动输送带式布置的地面系统将收集它们。“那里有各种各样的地震采集技术,主要是牵引,”iDrop的创始人兼首席执行官KyrreJTjøm说道,他曾在斯伦贝谢工作并为其提供咨询服务。 Equinor和Seabed Geo解决方案。 “还有一些节点由ROV放置在海床上。在其他地方,您可以使用混凝土压载物和一些推进替代品将其倾倒在一侧。我们的系统将消除大型专业船舶的必要性,这些船舶具有重型搬运机械和耗时的ROV操作。“
他说,可以快速部署Oceanids组,并且可以增加传感器点粒度(即区域覆盖范围,因此可以检索多少数据)。这要归功于69度至垂直自主侧向位移能力,每个节点“下降”到预设位置。 “如果你想在水深1200米处部署一个传感器,你可以在距离水面船只2公里处安装一块传感器,而不是一条线路,”他说。
Tjøm说,与已有方法相比,可以在15分钟内完成9个节点的批次,每个节点都有一个感应式调制解调器,应答器和地震传感器有效载荷,节省了10倍的时间。基于扩展建模和测试的数字双胞胎将用于帮助识别任何环境影响,例如。波,电流,深度等,因此能够控制下降。
“我们正在考虑彻底改变海底节点在海底的安装方式,”Tjøm说。 “竞争对手每天要做40-170次,需要两台ROV,DP控制的节点处理系统,一艘大型船只和专业船员。你走的越深,ROV越慢,因为他们需要更多的推力来拉脐带。我们每天只需不到1000名标准船员。“
在幕后的Oceanids项目中已经投入了大量的工作,而且现在才开始推广这项技术。事实上,该项目始于2010年,其原型建于2013/14年。 iDROP还构建了一个恢复系统,并进行了近岸测试,用于验证恢复系统。今年计划在北海进行第二次试验,在深水中获取三维地震数据。已经建造了9辆车,并将在上半年进行海上测试,计划在未来一年内建造更多。
MUM就是这个词
蒂森克虏伯海事系统公司(MS)是德国工业集团的一部分,正在与uSEA和uLARS进行不同规模的合作。该公司正在设计一个非常大(长达50米)的无人水下航行器(UUV),称为可修改的水下母舰(MUM),基于模块化设计,包括基本和任务模块。
其背后的想法是,今天的海底水下航行器市场由专业产品主导,没有一辆车可以用于多项任务。因此,蒂森克虏伯开始着手设计一个模块化系统,负责监督Thyssenkrupp MS项目的Willem Hendrik Wehner说。
 蒂森克虏伯的MUM概念(图片来源:蒂森克虏伯)
蒂森克虏伯的MUM概念(图片来源:蒂森克虏伯)
基本模块将是装饰和潜水系统,电池,推进和氢燃料电池。然后,以任务为中心的模块可以从海底地震节点(OBN)部署(> 1000个OBN)到核心钻井系统,或从海底控制模块更换到托管远程操作的车辆,其将使用大型UUV作为母船。 MUM模块化套件包括尺寸为标准20英尺或10英尺集装箱的模块。它们可以根据任务规格进行组合,从而产生完全不同的车辆,从80公吨到300公吨以上,或从20米长,4米宽和3米高到大约50米长,7米宽和3米 - 高,功耗取决于有效载荷和推进速度。
“其他水下航行器确实采用模块化方法,但主要是通过增加有效载荷部分或通过增加更多能量来延长耐久性,”Wehner说。 “一个很好的例子是ATLAS的SeaCat AUV,它可以通过交换车辆的头部来改变其有效载荷,并可以通过增加更多的电池容量来扩展范围。”
Wehner表示,MUM车辆可以行驶数百英里,具体取决于车辆配置,具有80-160kW的氢燃料电池功率,以及低至数千米的水深。 “水下航程可扩展,在100海里的范围内;对于目前的用例来说,这完全足够了,“他说。 “我们的燃料电池储气系统在每体积能量方面比电池高出约三倍,在重量方面甚至更高。但是,如果您想要超过1000海里,我们建议使用更传统的柴油电动方式进行近地面运输。这个概念允许这样做。“
氢燃料电池是蒂森克虏伯潜艇经过验证的独立于空气的技术;该公司在德国HDW Class 212A潜艇以及其他潜艇上拥有丰富的氢燃料电池经验。蒂森克虏伯表示,某些有效载荷的峰值负载可能需要电池,但目前大多数MUM车辆设计只有一个小型备用/应急电池。目前正在设计用于地面或近地面运输的模块,因为燃料电池系统具有承受水下任务的优势。
对于远程通信,在长期任务中,蒂森克虏伯MS希望使用具有双向数据传输能力的自推进调制解调器或自主通信节点,通过这些节点链创建远程声学通信,以及通过USBL调制解调器进行本地导航或3D定位。这些是在EvoLogics的一个名为NaviMUM的子项目下开发的,并将从MUM上的左轮手枪杂志上部署。
EvoLogics将这一概念称为自组织移动水下网络,节点形成中继站并提供定位。他们将在任务区域自主扇出,分析通信环境,然后保持位置和互连,形成灵活的水下网络。 Wehner说,有些人会有GNSS接收器,以获得定期的实际定位。
“像MUM这样的大型车辆尤其需要强大的传感器和算法来实现自动避障和跟踪重新规划,”蒂森克虏伯说。 “反映各种可能的车辆配置的自动调节控制算法将支持车辆的概念。该项目开发了一个移动通信和导航系统,该系统采用自行式LBL / USBL调制解调器,可以在MUM车辆上建立网络和码头,用于运输和充电。
蒂森克虏玛MS正在建造一个5米长的小型MUM版本,将于今年夏天(2019年)准备好进行测试。许多概念,特别是自治软件和移动通信,将在该系统上进行测试。新型氢燃料电池等核心技术以及新型耐压壳体设计也将在今年进行实际尺寸测试。
实际规模的MUM车辆将于2020年开始测试,测试和试验将达到2023-24。该开发项目得到了石油和天然气行业的咨询小组的支持,其中包括运营商Equinor,地震公司PGS和海底承包商Boskalis。
该公司还有ATLAS ELEKTRONIK,柏林技术大学和罗斯托克大学,分别负责该项目的控制系统和系统仿真。


深的海底热液喷口烟囱采集地质样本。科学家在大西洋探索最少的区域之一——赤道无风带巨型转换断裂带——发现了两个新的海底热液喷口区。这个大型的、构造活跃的系统横跨大西洋中脊,而大西洋中脊构成了世界上最长的山脉。这类喷口区因其混合的“管道”系统而十分罕见,其特点是典型的……")



“尼尔·阿姆斯特朗”号研究船上的研究人员部署了海洋观测系统,用于收集真实世界的环境数据,以支持业务决策、建模和长期海洋监测。© WHOI")
")

的一个新物种,该属蠕虫俗称蛛丝虫。考察科学团队测试了一项新技术,该技术为科学家提供了一种新的、非侵入性的方式来研究这些奇特的动物。图片来源:ROV SuBastian / 施密特海洋研究所")

(图片来源:Vard)-171000 "VARD 9 42 设计的 RV11000(Inkfish 版本)(图片来源:Vard)")