飞行新路线海底

图片:Modus Seabed Intervention

图片:Modus Seabed Intervention

图片:Modus Seabed Intervention
总部位于英格兰东北部的Modus Seabed Intervention Limited是一家相对较小的企业,但其目标雄心勃勃且专注。伊莱恩马斯林报道。
在开发基于改进的Saab Sabertooth AUV系统的混合动力AUV / ROV(HAUV)四年后,Modus Seabed Intervention现已购买其第二个深水级Sabertooth,将于今年夏天交付。
收购其最新的3,000米级Sabertooth,将使该公司继续建立其业绩记录,并提供具有增强的人工智能和自主能力的车辆。
该公司的愿景是HAUV在海上石油和天然气以及可再生能源场所运营内场,包括独立于服务船的风电场。这可以通过地面部署系统或通过海底车库/对接站,车辆可以“飞行”进出。从对接设施,车辆可以作为AUV(没有系绳),使用车载电池运行,或者,在需要直接控制的情况下,它可以通过光纤系绳(可以实现非常长的偏移)像ROV一样操作,或通过全权和控制脐带。
对接站不是从专用支撑船部署,而是设计成从船舶起重机部署到海床。目的是使用已经在特定位置使用的船只,例如供应船,DSV或海上可再生能源服务船。然后,HAUV可以与船舶的主要活动协同独立地进行检查和/或调查,从而降低成本。 HAUV将在完成工作范围后返回其码头,并等待在方便的时间恢复。 “例如,如果您已经让船只进行平台供应运行,您可以在出路时卸下HAUV,然后在完成预定任务后的路上捡起它,”Nigel Ward,Modus说。 ' 首席商务官。根据Modus当前HAUV的电池容量,可以在一次自动充电上运行大约60km的测量,测量时间取决于速度和有效载荷。
Modus的背景是海底挖沟服务。当该公司希望投资新技术时,它认为ROV市场已经成熟,如果不是饱和的话,那么Modus希望实现多样化并收购Remus AUV,以便从已经已经过的船只提供更低成本的调查和检查服务工作。目的是在船只继续执行其主要任务(而不是使用ROV,捆绑ROV支持船只)时,将货船卸下并让Remus下班并继续工作。这些好处被视为减少人为错误使海上项目更容易,使熟练的员工在岸,减少成本和提高安全性。
Remus并不是Modus参与活动的正确工具。它带有侧扫声纳,但客户想要测深,并且像许多AUV系统一样,很难升级车辆或更换不同应用的传感器,“沃德说。 “无论如何,市场上现有的AUV实际上并不是那种自主的,通常船只需要在一个范围内跟踪车辆,在我们看来,它会击败自主功能的对象。”
 图片:Modus Seabed Intervention
图片:Modus Seabed Intervention
因此,Modus看着Saab Seaeye的Sabertooth。 “这是ROV和AUV之间的交叉。我们想要两者的好处。能够快速,轻松地安装灵活的测量传感器有效负载对于满足客户要求至关重要。我们可以雇用一个传感器,集成它,远离你。
目前正在开发的新调查技术如此之多,因此我们希望确保能够使用它以便将来证明该车辆。
“我们还希望能够像ROV一样盘旋,拥有AUV的速度并能够执行真正的自主操作,因此您不必专门用船只来追踪HAUV的超短基线定位系统。我们觉得Saab Sabertooth符合这个标准。
“该车在其基础套件中依赖于其IXBlue Phins3 INS和RDI主力DVL,具有由QINsy管理的传感器数据的数据采集,导航和处理,其还接收Novatel DGPS数据。然而,有效载荷是灵活的,它也可以在长基线(LBL)阵列或需要的USBL系统中工作,使用Sonardyne AvTrak 6,在一个中提供传感器,收发器和遥测链路,“Ward说。
2017年,公司进行了示范和试验,HAUV已准备好在2018年进行商业运营。在2017年的一个试验项目中,HAUV从靠近瑞典萨博工厂的湖边码头发射,进行“割草”草坪“风格预编程调查收集大约15公里路线上的MBES,SSS和SBP数据,没有来自支持船只的外部帮助(只有车辆的DGPS,INS和DVL)。沃德说:“外出并重复调查后,它看起来很少漂移。”该车也成功试验了多次,自动对接到其海底车库。在2018年初,该功能得到了进一步发展,作为英国创新的风电场居民检查项目的一部分。该试验在Blyth的ORE Catapult工厂进行,还使用Blue Logic电感连接器进行间接电源耦合和数据传输。
在这个资助的示范项目的最后阶段,今年晚些时候,在其商业承诺之间,该公司将在英国的一个海上风电场试用一个驻留的混合AUV概念。 HAUV及其对接站将被卸下执行任务,类似于Blyth的ORE设施的演示。在这种情况下,它不会与任何风电场基础设施接口。 “然而,为了将扩展坞插入风电场,接入电源和通信将相对简单”,沃德说,“因为已经有可用于涡轮机工作的电力和数据基础设施,我们可以利用它。”
 图片:Modus Seabed Intervention
图片:Modus Seabed Intervention
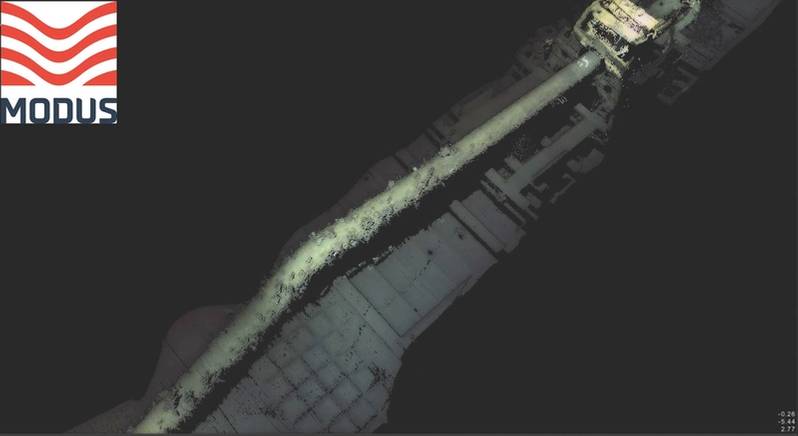
去年,Modus在澳大利亚西澳大利亚州部署HAUV,进行大约240公里的管道完整性调查,生成令人惊叹的图像,以及管道和过海生物的点云数据(参见鲨鱼牙齿的详细信息) 2knts)使用Cathx Scout激光轮廓和HD成像与多波束回声测深仪(MBES)一起传播。
调查时间是使用传统ROV进行调查时的一半,而且可能更快,“沃德说。 “这样的调查可以在没有绳索的情况下进行,但是在这种情况下,它可以通过绳索进行,以便收集实时数据。”
对于导航,车辆使用USBL辅助来跟踪管道的竣工图表中的路线位置列表。这可以与自主管道跟踪算法结合使用,该算法使用为MBES收集的管道配置文件数据来跟踪管道路径。如果竣工位置不准确,这可能是由定位公差引起的不准确引起的,这尤其有用。 “由于这些系统,AUV实际上可以看到管道,这意味着并不总是需要USBL辅助来执行管道检查,从而使自主操作远离支撑船,”Ward说。 “CathX激光系统为管道和相邻的海床提供了一个非常高分辨率的点云。激光和MBES点云在后处理中组合并用于评估位置和可能的自由空间。从激光系统获得的非常高的分辨率使其适用于阀芯偏转和其他基于摄影测量的计量测量。“
由于车辆稳定,安静并且可以在管道上方恒定的高度飞行,因此基于激光的点云产生的图像和测量结果与HD摄像机图像拼接在一起,非常准确且易于处理。
Modus瞄准的市场之一是海上风电。涡轮机阵列领域通常处于高电流区域,因此2017年该公司将其HAUV用于瑞典水电站的测试,其中4.5kt速度的车辆证明其能够在3kts电流下成功保持位置和机动。在海上风力发电场,通常有现场部署的步行到工作服务船进行维护活动,这些都是有效的酒店船,有很多冗余时间。我们已经开发出能够从这些船舶部署和回收的HAUV,基本上取代了动员ROV船进行检查活动的需要。它使服务船更有价值。
对于Modus来说,它不仅仅是视觉检查。该公司还在试验Force Technology的FIGs系统,该系统可以在进行GVI调查的同时进行4knts的非接触式阴极保护测量。
“Saab设计了一款坚固耐用的海底车辆,我们进一步开发了它,使其可以作为一流的测量和检测车辆运行,”Ward说。 “我们专注于如何集成传感器,如何相互通信,任务软件以及我们现在正在转向人工智能和机器学习功能。我们已经可以说'去这里,如果你看到一条管道,跟着它,或者如果你看到一个单桩,就可以围绕它进行检查'。这一切都在试验中得到了证明。下一组自主开发将非常令人兴奋。在短期内,我们希望自主开发HAUV轨道和勘测埋地电缆。目前正在试用各种管道跟踪技术。预计这将是一个快速发展,因为我们可以使用类似的算法来跟踪可见的管道。“
这不是一个轻松的旅程,但沃德看到有些人看到了潜力。 “毫无疑问,我们在将这项技术推向市场方面遇到了挑战,”他说。 “首先,许多公司希望以他们一直以来的方式进行操作,例如一些运营商仍然指定用于管道检查的ROV和动臂摄像头。但那些接受这种HAUV的客户需要采用略微不同的方法来应对GVI,这些客户已经获得了节省成本和提高数据质量的好处。
“HAUV已经在商业上运营了近一年,它的记录越来越多,我们对未来几个月我们计划进行的进一步优化和功能感到非常兴奋,此外还欢迎我们的第二个HAUV到船队几个月后。“


深的海底热液喷口烟囱采集地质样本。科学家在大西洋探索最少的区域之一——赤道无风带巨型转换断裂带——发现了两个新的海底热液喷口区。这个大型的、构造活跃的系统横跨大西洋中脊,而大西洋中脊构成了世界上最长的山脉。这类喷口区因其混合的“管道”系统而十分罕见,其特点是典型的……")



“尼尔·阿姆斯特朗”号研究船上的研究人员部署了海洋观测系统,用于收集真实世界的环境数据,以支持业务决策、建模和长期海洋监测。© WHOI")
")

的一个新物种,该属蠕虫俗称蛛丝虫。考察科学团队测试了一项新技术,该技术为科学家提供了一种新的、非侵入性的方式来研究这些奇特的动物。图片来源:ROV SuBastian / 施密特海洋研究所")

(图片来源:Vard)-171000 "VARD 9 42 设计的 RV11000(Inkfish 版本)(图片来源:Vard)")